简介
AQS(AbstractQueuedSynchronizer)就是一个抽象的队列同步器,它是用来构建锁或者其他同步组件的基础框架,它维护了一个volatile int state来表示同步状态,通过内置的FIFO队列来完成线程等待排队。
AQS的设计是基于模板方法设计的,可供实现的模板方法基本上可以分为三类:独占式获取与释放同步状态、共享式获取与释放同步状态和查询同步队列中的等待线程情况。
子类通常被推荐定义为自定义同步组件的静态内部类,子类通过继承AQS并实现它的抽象模板方法来管理同步状态,而这些模板方法内部就是真正管理同步状态的地方(主要有tryAcquire、tryRelease、tryAcquireShared、tryReleaseShared等)。
概览
uml
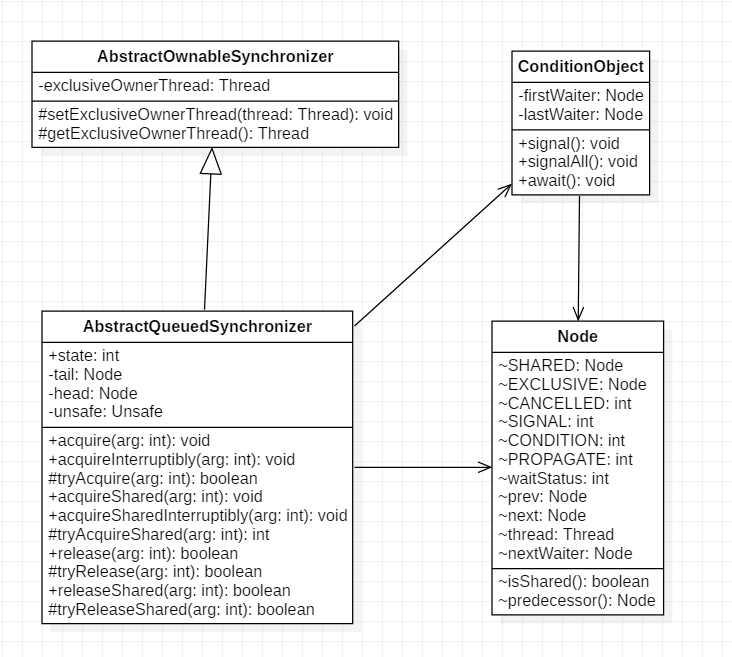
核心
状态
在AQS中,状态是由state属性来表示的,它是volatile类型的:
1 | private volatile int state; |
该属性的值即表示了锁的状态,state为0表示锁没有被占用,state大于0表示当前已经有线程持有该锁,这里之所以说大于0而不说等于1是因为可能存在可重入的情况。你可以把state变量当做是当前持有该锁的线程数量。
对于独占锁,同一时刻,锁只能被一个线程所持有。通过state变量是否为0,我们可以分辨当前锁是否被占用,但光知道锁是不是被占用是不够的,我们并不知道占用锁的线程是哪一个。在监视器锁中,我们用ObjectMonitor对象的_owner属性记录了当前拥有监视器锁的线程,而在AQS中,我们将通过exclusiveOwnerThread属性:
1 | private transient Thread exclusiveOwnerThread; //继承自AbstractOwnableSynchronizer |
exclusiveOwnerThread属性的值即为当前持有锁的线程,它就是我们在分析监视器锁的原理的时候所说的“铁王座”。
队列
接着我们来看队列,AQS中,队列的实现是一个双向链表,被称为sync queue,它表示所有等待锁的线程的集合,有点类似于我们前面介绍synchronized原理的时候说的wait set。
我们前面说过,在并发编程中使用队列通常是将当前线程包装成某种类型的数据结构扔到等待队列中,我们先来看看队列中的每一个节点是怎么个结构:
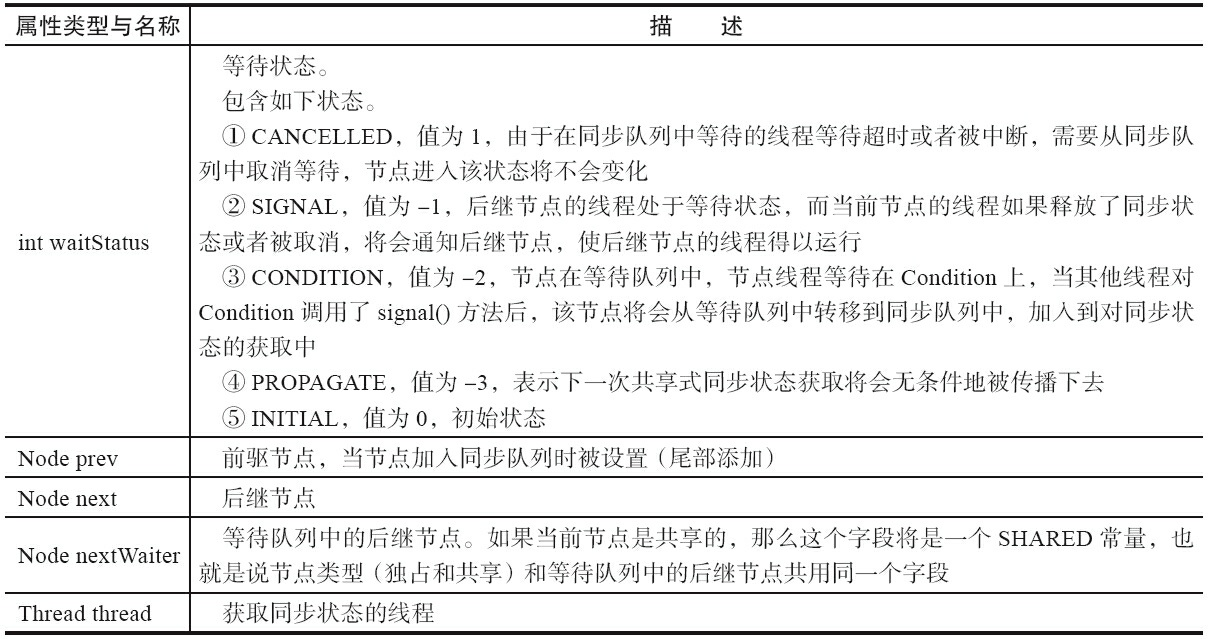
注意,在这个Node类中有一个状态变量waitStatus,它表示了当前Node所代表的线程的等待锁的状态,在独占锁模式下,我们只需要关注CANCELLED SIGNAL两种状态即可。这里还有一个nextWaiter属性,它在独占锁模式下永远为null,仅仅起到一个标记作用,没有实际意义。
说完队列中的节点,我们接着说回这个sync queue,AQS是怎么使用这个队列的呢,既然是双向链表,操纵它自然只需要一个头结点和一个尾节点:
1 | // 头结点,不代表任何线程,是一个哑结点 |
到这里,我们就了解到了这个sync queue的全貌:
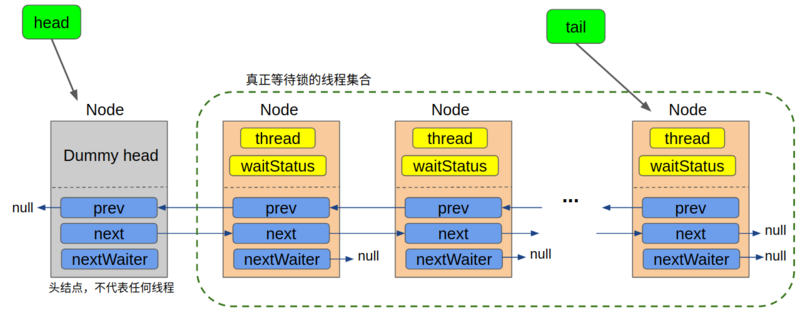
这里有一点我们提前说一下,在AQS中的队列是一个CLH队列,它的head节点永远是一个哑结点(dummy node), 它不代表任何线程(某些情况下可以看做是代表了当前持有锁的线程),因此head所指向的Node的thread属性永远是null。只有从次头节点往后的所有节点才代表了所有等待锁的线程。也就是说,在当前线程没有抢到锁被包装成Node扔到队列中时,即使队列是空的,它也会排在第二个,我们会在它的前面新建一个dummy节点(具体的代码我们在后面分析源码时再详细讲)。为了便于描述,下文中我们把除去head节点的队列称作是等待队列,在这个队列中的节点才代表了所有等待锁的线程。
在继续往下之前我们再对着上图总结一下Node节点各个参数的含义:
thread:表示当前Node所代表的线程waitStatus:表示节点所处的等待状态,共享锁模式下只需关注三种状态:SIGNALCANCELLED初始态(0)prevnext:节点的前驱和后继nextWaiter:进作为标记,值永远为null,表示当前处于独占锁模式
节点状态机
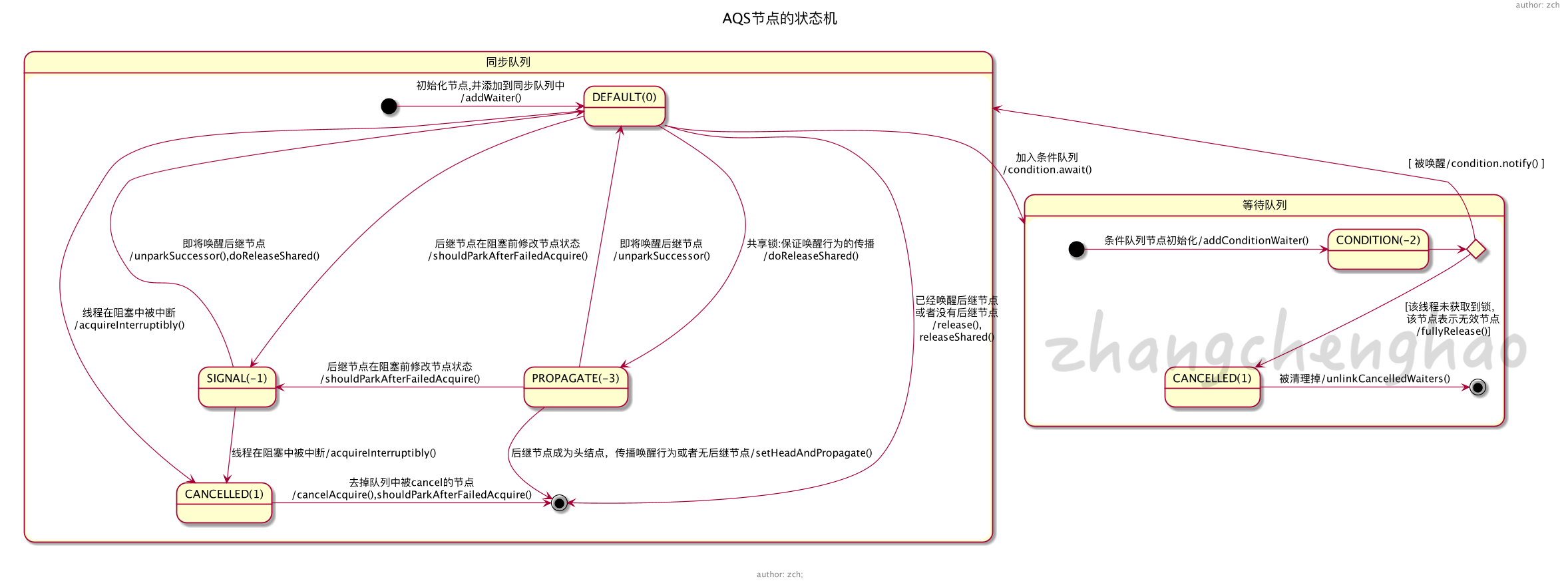
基于Node的的CLH阻塞队列是如何运作的
阻塞队列采用的是双向链表队列,头部节点默认获取资源获得执行权限。后续节点不断自旋方式查询前置节点是否执行完成,直到头部节点执行完成将自己的waitStatus状态修改以通知后续节点可以获取资源执行。CLH锁是一个有序的无饥饿的公平锁。// todo 表达有点问题,后续更改
首先确定自己是否为头部节点,如果是头部节点则直接获取资源开始执行,如果不是则自旋前置节点直到前置节点执行完成状态修改为CANCELLED,然后断开前置节点的链接,获取资源开始执行。// todo 表达有点问题,后续更改
CAS操作
前面我们提到过,CAS操作大对数是用来改变状态的,在AQS中也不例外。我们一般在静态代码块中初始化需要CAS操作的属性的偏移量:
1 | private static final Unsafe unsafe = Unsafe.getUnsafe(); |
从这个静态代码块中我们也可以看出,CAS操作主要针对5个属性,包括AQS的3个属性state,head和tail, 以及Node对象的两个属性waitStatus,next。说明这5个属性基本是会被多个线程同时访问的。
定义完属性的偏移量之后,接下来就是CAS操作本身了:
1 | protected final boolean compareAndSetState(int expect, int update) { |
如前面所说,最终CAS操作调用的还是Unsafe类的compareAndSwapXXX方法。
最后就是自旋了,这一点就没有什么好说的了,我们在后面源码分析的时候再详细讲。
